Creating a Line Follower Robot with AVR
The article "Creating a Line Follower Robot with AVR [Censorship]" is a continuation of Line Follower Robot article with a new AVR ATMega8535 samapai phase Line Follower Robot block diagram. In the article "Creating a Line Follower Robot with AVR Part 1 [Sensor]" This is a review of the sensor used on Line Follower Robot, and the components used. Sensors, can be analogous to the 'eye' of a robot that serves to 'read' the black line of the track robot or vice versa. So that the robot is able to know when he will turn right, when he turned left and when he stopped. Sensors used are usually photo reflector, LDR (Light Dependent Resistor), Photo Diodes and Photo Transistor - mounted on the front two or more below the line follower robot.There also are using the camera as a sensor (or image sensor) to a higher-resolution readout line, making more accurate robot motion.
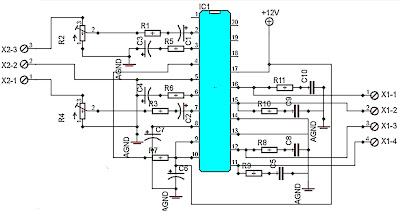
Line Follower Robot Sensor circuit with AVR ATMega |
| Robot Sensor circuit with AVR ATMega Circuit |
The working principle of the sensor is simple, when the transmitter (infrared) emitting light onto a white field, the light will be reflected back to the receiver by the white areas and vice versa. This gives the change in the voltage level at the receiver output, but it usually changes the voltage can not be accepted as a TTL logic level. To be able to read by the microcontroller, the sensor voltage should be adjusted to TTL voltage level that is 0-1 volts for logic 0 and 3-5 volts for logic 1. This can be done by installing the operational amplifier is used as a comparator as shown in the picture above.
Op Amp is used as a comparator LM324 IC, because IC is able to work at VCC 5 volt range and there are 4 in 1 Op Amp IC corresponding to the number of sensors are used. The sensitivity of this sensor can be set through R9 which controls the comparator reference point.
Maximizing Sensor Line Follower Robot
Line follower robot sensors can be made with a combination between LED and photo diode. Line follower robot sensor configuration is good to be able to read the track with a hard and fast. To make the robot sensor is firm and fast can not merely rely on the ability of photo diodes and LED configurations only. As an alternative to maximize the performance of line follower robot sensors can be added to the voltage comparator with Op-Amp. Sensor circuit line follower robot equipped with a voltage comparator that is ready to be connected to a microcontroller or PIC can use the following series of robot sensor.
Line Follower Robot Sensor circuit with voltage comparator
 |
| Voltage comparator Circuit |
Function of the voltage comparator circuit line follower robot sensor above is:
- Reinforce the logic level sensor output
- Amplifies the sensor output signal
- Control and determine the reference point sensor
- Reinforce the logic level sensor output is intended to avoid the floating logic conditions, with the goal of getting the process of transition logic (high) to a logic low (low) or vice versa in a fast sensors. So as to enhance the response to the sensor readings track work.
Sensor output voltage levels should be read as well by the TTL logic processor. If the robot sensors rely on photo diodes and LED configurations, then during the reading process is fast track, then the resulting signal has a logic low loevel differences and can not be read as a TTL logic. Therefore, robot sensor voltage levels are still weak need to be corroborated by a voltage comparator, so the TTL logic level differences firm with a strong signal.
The purpose of controlling and determining the sensor reference point is, we can determine the position of the robot sensor readings can be considered as a logic high or logic low. Choosing process reference value line follower robot sensor readings can be done by adjusting VR1 10kOhm the series "Line Follower Robot Sensor Voltage Comparator With" above.


Comments
Post a Comment